3D 표면 검사를 위한 광도 스테레오(Photometric Stereo) | 컴퓨터 비전 | Euresys
개요
머신 비전 애플리케이션의 대다수는 2차원 이미징을 사용하여 해결되지만 3D 측정 및 검사를 사용하거나 이를 필요로 하는 머신 비전 애플리케이션은 크게 증가하고 있습니다. 장면에서 3D 정보를 추출할 때 다양한 기술이 사용됩니다. 구조광(레이저 스캐닝 기반 삼각 측량 포함), 스테레오 또는 스테레오스코픽 비전 및 비행 시간 센서에 대해 설명하겠습니다.
이러한 기술 중 하나는 아마도 덜 알려진 광도 스테레오일 것입니다. Euresys의 광도 스테레오 기능은 단일 시점에서 방향이 다른 조명 아래에서 찍은 동일한 표면의 여러 이미지를 캡처하여 표면의 각 지점의 방향과 알베도를 추정합니다. 조명과 동기화하여 서로 다른 이미지를 순서대로 캡처하므로 카메라는 하나만 있으면 됩니다.
광도 스테레오는 대상 표면에 존재하는 세부 사항(결함 또는 정보)의 감지 또는 검사에 적합합니다.
광도 스테레오 알고리즘은 Euresys의 Open eVision Easy3D라이브러리에서 사용할 수 있습니다. 이는 코드 판독(EasyMatrixCode, EasyQRCode 또는 EasyBarcode라이브러리 사용), 광학 문자 인식(EasyOCR), 정렬(EasyMatch 또는 EasyFind), 측정(EasyGauge) 또는 결함 감지(EasyObject 또는 EasySegment) 등의 다른 작업 전 전처리 단계로 사용할 수 있습니다.
작동 방법요?
지정된 비전 설정(검사할 대상, 조명(일반적으로 3 또는 4) 및 카메라의 위치 및 각도)에 대해 소프트웨어 도구는 먼저 기준 대상[(반)구]의 보정 또는 설정 정밀 기하학적 특성의 수동 도입을 필요로 합니다.
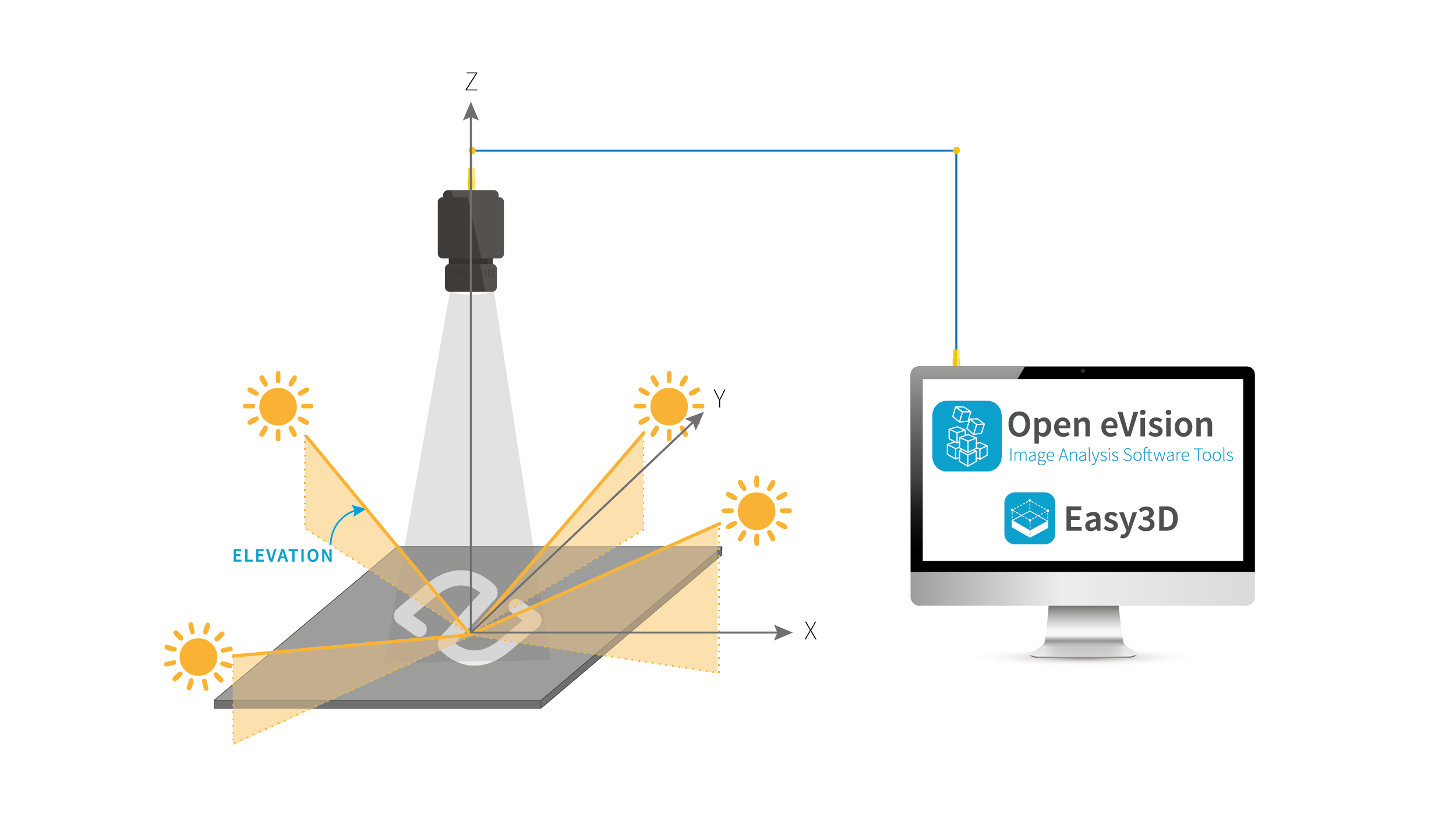
그림 1. 카메라 앞에서 다양한 조명 각도의 검사 대상.
과정
그 다음부터 검사 대상의 이미지 캡처는 다양한 조명 각도에 따른 여러 단계로 수행됩니다.
사용자의 요청에 따라 광도 스테레오는 여러 변수(표면에 수직, 알베도, X 및 Y 기울기, 평균 및 가우스 곡률)를 개별적으로 추출합니다. 이들은 2D 영역에서 3D 정보의 재구성/렌더링에 사용되어 다른 라이브러리에서 추가 처리가 가능합니다.
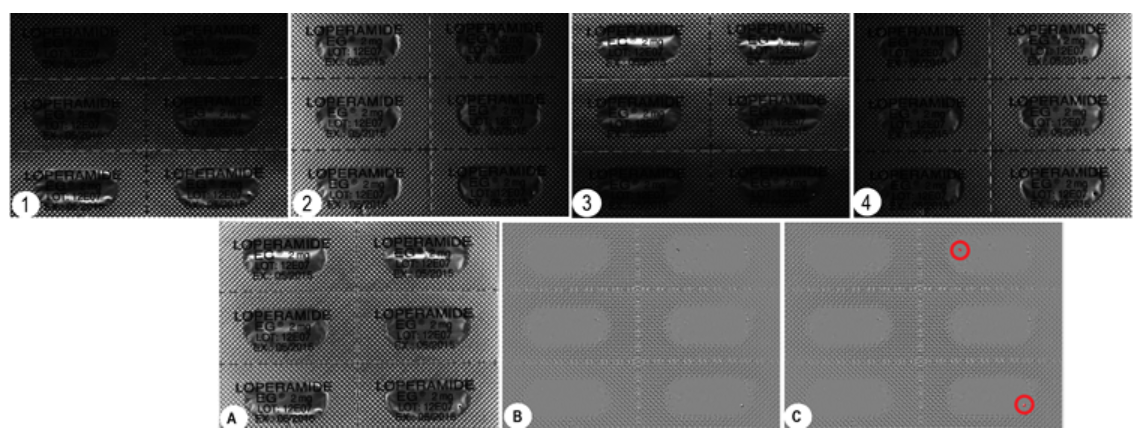
그림 2. 다양한 조명 조건 및 검사에서 블리스터 이미지.
위의 그림 2는 전체 과정입니다.
- 4가지 조명 조건에서 카메라에 캡처된 대상(이미지 1~4)
- 선택한 측정값을 기반으로 재구성된 이미지(이미지 A)
- 선택한 검사에 유용한 분리된 데이터 일부(이미지 B)(여기서는 가우스 곡률 정보 사용)
- Open eVision EasySegment 라이브러리를 사용하여 딥 러닝으로 검사한 결과 (B)의 이미지에 지도 모드(이미지 C)를 적용했습니다. 두 개의 구멍난 위치를 정확하게 식별할 수 있습니다.
최적화
몇 가지 테스트를 통해 사용자는 가장 적절한 변수를 식별하여 애플리케이션에 대해 복구할 수 있습니다. 이러한 단계를 통해 최적화를 이룰 수 있으며 결국 시간이 중요한 과정의 속도가 높아질 수 있습니다.
예를 들어 일부 감지의 경우 특정 선형 감지 또는 날카로운 모서리 감지가 필요합니다. 특정 관심 영역(ROI)도 지정할 수 있습니다. 이러한 매개변수를 실제 애플리케이션에 맞게 조정하면 속도가 크게 향상됩니다.
때때로 완벽하지 않은 대상 위치, 관찰 조건 또는 조명을 고려하여 이 기능에는 다음이 보상될 수도 있습니다.
- 주변 조명(어두운 이미지) 및
- 고르지 않은 조명(평면 참조 이미지)
결론
원본 이미지에서는 원래 감지할 수 없는 유용한 정보가 표준 eVision 라이브러리(이 경우 EasySegment)에서 효과적으로 활용되도록 광도 스테레오로 어떻게 향상되는지 알 수 있습니다.
광도 스테레오 이미저 기능은 Euresys의 Open eVision Easy3D라이브러리에서 사용할 수 있습니다.